Винтовые рулевые механизмы могут быть следующих типов:
1) винт — гайка— рычаг;
2) качающийся винт — гайка;
3) винт — качающаяся гайка;
4) винт — гайка — сектор.
Передаточное число винтового рулевого механизма может быть постоянным или переменным в зависимости от конструкции механизма.
Рулевой механизм качающийся винт — гайка имеет переменное передаточное число, уменьшающееся при перемещении гайки в крайние положения.
При повороте рулевого, колеса вправо или влево передаточное число изменяется неодинаково, однако разница получается небольшой. По остальным показателям данный механизм мало отличается от предыдущего, за исключением рулевой колонки, габариты которой несколько больше в связи с: тем, что рулевой вал должен качаться. Для этой цели в верхней части рулевого вала установлен подшипник, допускающий качание вала. Следует отметить также, что в этой конструкции отсутствует регулировка осевого зазора рулевого вала.
Рулевой механизм качающейся винт — гайка устанавливают на автомобилях большой грузоподъемности, в частности, на автомобиле МАЗ-525 и на троллейбусах.
Данный механизм имеет весьма небольшие габариты и вес, что позволяет устанавливать его на легковые и, в частности, малолитражные автомобили. Зазор между винтом и гайкой не регулируется, и в случае износа эти детали надо заменять. Осевой зазор рулевого вала в этой конструкции можно регулировать. К. п. д. остается низким. Последнее обстоятельство не имеет существенного значения в том случае, когда механизм устанавливают на малолитражном автомобиле, где усилие, необходимое для поворота, невелико. В тоже время благодаря малому к. п. д. при передаче усилия от управляемых
колес толчки на рулевое колесо почти не передаются.
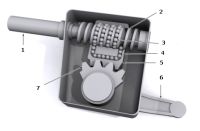
Стремление к увеличению к.п.д. привело к появлению винтовых рулевых механизмов с шариковыми гайками, где трение скольжения заменено трением качения. Последнее обстоятельство позволяет осуществить большое передаточное число, при этом рулевой механизм является обратимым. В конструкции обеспечивается непрерывная циркуляция шариков, для чего концы нарезки гайки замыкаются двумя трубками, заполненными шариками.
Зазор между винтом и гайкой не регулируется, но можно регулировать зазор в зацеплении сектора и рейки, а также осевой зазор рулевого вала. Габариты и вес механизма достаточно малые.
Кривошипные рулевые механизмы
Кривошипные рулевые механизмы могут состоять из:
1) червяка и кривошипа с одним скользящим или вращающимся пальцем;
2) червяка и кривошипа с двумя скользящими или вращающимися пальцами.
Особенностью кривошипных рулевых механизмов является возможность получения заданного характера изменения передаточного числа. В зависимости от условий, поставленных при изготовлении червяка, можно получить рулевой механизм с постоянным передаточным числом или с передаточным числом, увеличивающимся или уменьшающимся при повороте рулевого колеса от среднего положения.
Схема кривошипного рулевого механизма с одним скользящим пальцем выглядит следующим образом. Червяк нарезается пальцевой фрезой, которая перемещается по такой же траектории, как и палец кривошипа. При равномерном вращении червяка в станке и равномерном перемещении фрезы передаточное число рулевой пары получается постоянным. В случае равномерного вращения винта и неравномерного перемещения фрезы передаточное число получается непостоянным и зависит от закона перемещения фрезы.
В зацеплении пальца с червяком зазор делают непостоянным, чтобы его можно было регулировать в случае износа пальца. Для получения неодинакового зазора пальцевая фреза при нарезке червяка должна перемещаться вдоль своей оси; по мере удаления от среднего положения червяка фреза углубляет нарезку. Траектория пальцевой фрезы, а также и пальца кривошипа проходит таким образом, что проекция оси червяка на плоскость траектории пересекает последнюю в двух точках, т. е. в среднем положении червяка палец кривошипа находится выше осевой линии червяка. Это дает возможность обеспечить больший угол поворота вала рулевой сошки без выхода пальца кривошипа из зацепления с червяком и в то же время позволяет пальцу кривошипа трение скольжения между пальцем и червяком. Для увеличения к. п. д. и уменьшения износа червяка и пальца последний устанавливают на кривошипе в подшипнике. Как правило, в этих механизмах предусматриваются две регулировки: регулировка зазора рулевого вала и регулировка зазора в зацеплении пальца с червяком; последнее достигается перемещением вала сошки вместе с кривошипом вдоль своей оси.
В настоящее время кривошипные рулевые механизмы с одним пальцем почти не применяются из-за недостаточной прочности, большого удельного давления в зацеплении пальца с червяком и интенсивного износа рулевой пары. Этот недостаток в значительной степени устраняется в кривошипных рулевых механизмах с двумя пальцами. Наряду с уменьшением удельных давлений, а следовательно, и износов, такая конструкция обеспечивает возможность получения большего угла поворота рулевой сошки по сравнению с однопальцевой конструкцией, что особенно важно для автомобилей высокой проходимости. Поворот сошки увеличивается на угол а, зависящий от расстояния между центрами пальцев и радиуса кривошипа.
При небольших углах поворота колес оба пальца кривошипа находятся в зацеплении с червяком, а при увеличении угла поворота один из них выходит из зацепления. Шаг резьбы червяка непостоянный, но он нарезается, так, чтобы было возможно одновременное зацепление двух пальцев с червяком на некотором участке и в то же время обеспечивался бы заданный характер изменения передаточного числа. В существующих конструкциях передаточное число механизма изменяется, увеличиваясь в крайних положениях. В случае применения вращающихся на подшипниках пальцев уменьшаются потери на трение и износ. По остальным параметрам двухпальцевый рулевой механизм мало чем отличается от однопальцевого.